城市空中交通及其新型基础设施低空公共航路研究综述 (2)
UAM 的构成
一种新型交通方式的实现,必然需要了解其组成,以帮助充分理解UAM 的特点,明晰其实现运营的关键点。本节对UAM 所涉及的基本内容、最受关注的载运工具eVTOL 航空器、以及UAM 的基础设施进行综述。
一、UAM 基本概念
为加强对无人机驾驶航空器的管理,NASA在2013 年首次提出UTM 的概念,2015 年NASA和小型无人机系统(Small Unmanned Aircraft System,sUAS)运营人明确提出建立超低空域的UTM 系统。UAM 与UTM 不同,但又有相似之处,为探究此问题,本节首先对UAM 设计的基本内容进行分析,后对UAM 与UTM 的区别进行综述性研究。
1、UAM 涉及的基本内容
UAM 作为一种新型交通方式,其运行范围不再局限于水平空间,且与地面交通联系紧密,兼具运输航空的计划性特征和地面交通按需响应的特性,其引入必然会给城市内部交通系统带来根本性变革。同时,UAM 在点到点的出行需求链中,如小汽车、地铁一样,是可选择的出行方式中的一种。将UAM 融入城市交通系统中,不仅需要考虑UAM 本身的特性,更要通过合理设置UAM 地面基础设施,将UAM 与包括地铁、公交、小汽车等地面交通的实现无缝耦合与精细化管理,帮助乘客便捷换乘,实现多式联运。为保证其运行安全与高校管控,需要系统性、全方位对UAM 涉及的基本内容进行讨论,其框架如图1 所示,各个模块定义如下所示。
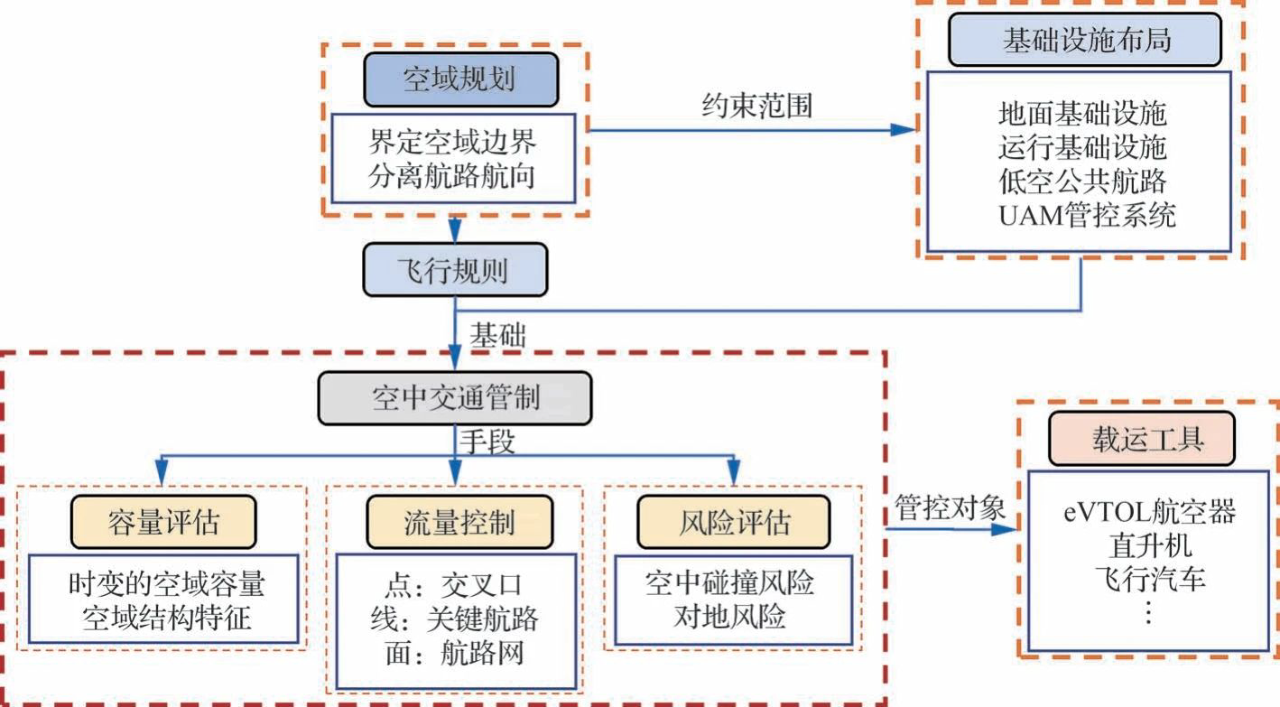
图1 UAM 涉及的基本内容
1)空域规划
空域规划可对UAM 运行范围及其所占空域资源的边界进行界定,通过设计空域结构可有效分离航线方向,从而降低UAM 管控难度。UAM 的运行空域通常定义为城市内真高1 000 m以下的低空空域,由于UAM 尚未形成行业体系,目前其空域分类与民用航空空域分类保持一致。在现有的空域分类中,UAM 可能在B、C、D 类空域内运行,与用于运输航空巡航的A 类空域无交集。
2)航路规划
在规定的空域范围内,eVTOL 航空器飞行路径的规划关系到UAM 流量密度、安全以及效率的平衡,对航路进行合理的设计能够有效降低因航线增加造成的碰撞概率指数倍增长。
3)飞行规则与流量控制
UAM 系统中飞行规则能更具体的约束航路中eVTOL 航空器的飞行行为。飞行规则的设计与规范是UAM 进入航路局部精细化管理和飞行流量控制的第一步。对eVTOL 航空器进行流量控制的根本目的与运输航空一致,即对eVTOL航空器进行航向分离与安全间隔保障,防止航路容量过饱和,确保运行安全。
4)容量评估
低空空域是空间上普遍存在的非消耗性自然资源,其可再生性强,具有时间和空间的属性。因此,空域容量具有时变的特征,随着时间的变化,空域容量会有所不同,对空域容量进行实时评估可以避免空域流量过饱和而发生碰撞事故。此外,空域容量与空域结构化方式紧密相关,空域水平方向上路径过度结构化会制约空域容量的提高,而每一层空域eVTOL 航空器航向的垂直分离则有助于最大化空域容量。
5)空中交通管制
一旦城市空中交通运输商业化运输得到规模化推广,传统的空中交通管制方式将不再适用于高流量、高密度的eVTOL 航空器航路管制。城市空中交通管制应涵盖且不限于非法入侵eVTOL 航空器的检测与驱逐服务、特殊任务eVTOL 航空器专机引导服务、紧急情况应急降落引导服务以及间隔管理与指挥服务。
6)风险评估
风险评估是针对eVTOL 航空器、UAM 管控系统以及航路运行等方面风险的分析、评估、处理及监督的系统性应用,目标是确保相关风险控制在一个可接受的水平。低空运行风险主要包括低空运行对其他eVTOL 航空器的空中风险和对地面第三方公共财产造成直接或间接的风险。其中,对地风险主要来自eVTOL 航空器坠地伤人、螺旋桨运行噪声污染和机载摄像窥探隐私等直接或间接风险。
7)基础设施
UAM 的基础设施仅包括供eVTOL 起降的地面基础设施、UAM 管控系统、公共航路网和用于满足飞行通讯、导航、监视等需求的运行基础设施。UAM 的运行需要依托基础设施完成,但同样基础设施的布局会反作用于UAM 影响其发展。地面基础设施如何布局,用何种通信导航监视技术,怎样实现对如此庞大数量的eVTOL 航空器的全覆盖具有重要的应用研究意义。
8)载运工具
UAM 载运工具数量多,类型丰富,但多数试飞场地环境较好,航线单一,无需考虑安全避撞问题,UAM 商业化市场的到来对UAM 载运工具的自主感知避撞提出了较高的要求。Uber 白皮书指出,UAM 实现运营的关键是运行事故率低于汽车事故率的2 倍,甚至达到民航运输事故率水平,更进一步eVTOL 航空器的发展方向决定未来UAM 的管控方式与发展潜力,因此打造“安全可靠、便捷高效、经济舒适”的eVTOL 航空器对UAM 市场的进一步发展至关重要。
2、UAM 与UTM 的区别与联系
相比于传统有人驾驶航空器,eVTOL 航空器是一种颠覆性的创新,给空中交通管理的运行概念与规则、管制要求以及基础设施布局与建设都带来了新的挑战。如何构建UAM 与UTM 运行概念,使不同类型的eVTOL 航空器与传统有人驾驶航空器进行空域协调与融合运行,中国尚未明晰实施路径,但NASA 和美国联邦航空管理局(Federal Aviation Administration,FAA)在这些方面的研究为我国UAM 整合工作提供了建议,本文将从运行概念,管控模式以及空域范围3 个方面阐述UATM 与UTM 的区别。
在运行概念上,这两者均允许大规模的载运工具同时运行,通过数字化的方式将所有载运工具交互连接,并为其提供分离服务。UTM 系统对超低空空域内大规模运行的所有无人机提供交通管理服务航空器类型更丰富,UAM 则只为进行载人载货运输的载运工具提供服务。在管理模式上,UTM 系统主要有3 个角色:管理者(FAA),运营商,无人机操作员。运营商通过共享飞行计划进行轨迹分离与冲突解脱,信息共享和数据交换通过飞行员与飞行员、无人机与无人机、飞行员与FAA 直接沟通完成。FAA 向飞行员提供实时空域信息,飞行员可在规定空域内自主飞行,不接受空中交通管制(Air Traffic Control,ATC)。UAM 比UTM 更严格,其运行概念主要对照有人驾驶航空器的运行规则,ATC系统可对UAM 进行实时管制。在空域范围上,UTM 的运行范围为400 ft(1 ft=0.304 8 m)以下的高度,在G 类空域内有UTM 向无人机和有人机提供管控服务,且无人机和有人机的权限等级相同。UAM 的运行空域一般在400 ft 以上的空域,除非在起降场地周围才会延伸到400 ft以下直至地面的高度范围,起降场地的确定也建议尽量选在400 ft 以上的区域,运行范围主要在1 500~4 000 ft 高度内。
二、UAM 载运工具
UAM 各类型载运工具在机型、气动布局、动力模式等方面差距很大,载运工具作为UAM 能否实现运营的关键,对此进行讨论是必要的。本文将对不同的载运工具进行对比,分析eVTOL航空器受到关注的原因,并阐述eVTOL 航空器的市场应用现状。
1、载运工具对比与分析
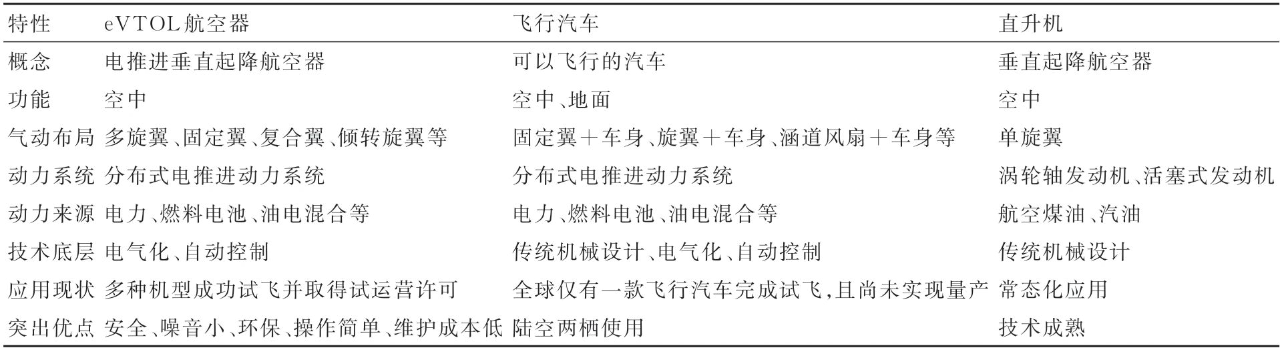
eVTOL 航空器的成功研发促进了UAM 快速走进大众视野,对于UAM 载运工具的讨论从未停止。UAM 载运工具中,直升机最早得到应用,但关注度远低于eVTOL 航空器,主要原因是eVTOL 航空器具有噪音小、环保、安全、维护成本低,机型多样等特点,其主要技术优势可归纳为以下几点,如表2 所示。
表2 UAM 载运工具对比
1)分布式电推进动力系统(Distributed Electric Propulsion,DEP)
DEP 系统动力冗余设计使得飞行器不会因某个发动机故障而发生意外,例如六旋翼eVTOL 航空器在失效1~2 个旋翼仍能正常降落,安全性远高于直升机。动力系统的分布式布局同样能够提高飞机的气动效率和升阻比,其效率远高于直升机。此外,小尺寸电机大幅简化动力系统的机械结构,再加上电机自身出色的耐用性,维护成本更低。
2)电池技术
eVTOL 航空器没有发动机,只有电池,很好的解决排放问题的同时噪音更小。因为其没有发动机噪音仅产生气动噪音,噪音值远低于直升机。NASA 测试Joby 预生产的四座eVTOL 航空器以185 km/h 巡航速度,在500 m 的高度巡航时产生的噪音为45.2 dB,城市街道几乎听不到噪音。
3)气动布局
eVTOL 航空器与直升机气动布局差距大,机型多,面对不同需求的任务有更多的选择。多旋翼构型将复杂度集中在飞行控制上,能以极少的运动部件实现垂直起降能力;复合翼和倾转旋翼构型可以缓解多旋翼续航里程短的问题,且倾转旋翼构型的eVTOL 航空器死重小。
除eVTOL 航空器外,飞行汽车也是新兴的UAM 载运工具,但其市场关注度远低于eVTOL航空器,主要是以下几个原因。
1)概念与功能
eVTOL 航空器只能在空中运行,飞行汽车可以陆、空两栖使用。但车辆和飞机的设计要求存在诸多矛盾,陆空两用飞行汽车设计需要兼顾车辆和飞机2 种需求,这也是陆空两用飞行汽车的根本性设计难点。最终的产品设计上也必然会倾向于其中一种使用场景而牺牲另一种使用场景的需求,结果要不就是行驶性能相对更好(Flying Car),要不就是飞行性能相对更好(Roadable Aircraft)。
2)技术底层
飞行汽车是以传统机械设计为主,eVTOL航空器是以电气和自动控制为主。飞行汽车传统的技术难点是解决行驶和飞行的功能切换,涉及动力传动、机翼折叠存放和重心位置等问题,而这些主要设计问题属于传统机械领域。eVTOL 航空器的技术基础是飞控、电机、锂电池等,这些因素与自动控制和电气化技术密切相关,而这些相关技术在最近几十年才发展成熟到可以应用在载人航空器上。也正因此,eVTOL 航空器设计才能在最近十余年开始出现。
3)市场因素
虽然飞行汽车功能比eVTOL 航空器多,能用于地面行驶与空中飞行,但其技术难度决定了面世的产品较少。目前全球唯一一款真正完成试飞的飞行汽车小鹏X3 尚未实现量产,其研发进度上远慢于eVTOL 航空器。
2、eVTOL 航空器
作为UAM 系统中最受关注的载运工具,eVTOL 航空器对起降场地面积要求更低,产生的噪音较小,操作简单且安全性更高。由于空中载运工具单位载运成本更高,在保障安全的前提下UAM 将更倾向于采用自主驾驶或远程遥控驾驶(Remotely Piloted Aircraft Systems,RPAS)技术,这与近年来地面载运工具采用自动化与智能化驾驶技术的发展趋势相一致。因此,eVTOL 航空器将迅速成为城市地区短途通勤的首选交通工具。
据垂直飞行协会(The Vertical Flight Society)统计,市面上电推进垂直起降eVTOL 航空器和混合动力模式的eVTOL 航空器已经超过650 种,初步形成4 种主流机型,并应用于交通监控、灾害监测、火灾监视、检查等多种场景的运输。摩根士丹利预测2040 年eVTOL 航空器市场高达万亿美元。中国UAM 企业以广州的亿航智能和小鹏汇天,上海的峰飞,以及浙江的吉利汽车为代表。亿航216 技术上已经实现了载人飞行器的自动驾驶,获得中国民航局批准成为国内首个自动飞行物流试运行许可,可率先开展150 kg 以上大载重空中物流商业化试运行,并协助民航局开展载人eVTOL 航空器的运行风险分析、适航标准制定和验证。
2022 年10 月小鹏汇天完成5 亿美金A 轮融资,是迄今为止亚洲低空载人飞行器设备生产领域获得的最大的单笔融资,其旅航者X2 是中国首款获得民航局特飞许可的有人驾驶eVTOL航空器。峰飞航空科技获国际航空资本融资1亿美元,其研发的首款自动驾驶eVTOL 航空器V1500M 已获得260 架订单。吉利沃飞长空自主研发的5 座级纯电动力eVTOL 航空器AE200第2 次试飞已成功完成。国外eVTOL 航空器初创企业包括美国的乔比航空(Joby Aviation)、Archer Aviation(ACHR)、Wisk,德国的Lilium Aviation、Volocopter、巴西Eve UAM 等。Joby Aviation 是全球第一家上市的民用空中交通工具初创公司,已经获得FAA 的135 部航空承运人认证,并完成了FAA 审查5 阶段中的第2 阶段,预计于2024 年开展空中拼车服务。Volocopter 获1.82 亿美元E 轮融资,已经研发VoloConnect、Volocopter 等多款eVTOL 航空器。Airbus 与意大利航空预计利用正在研发的CityAirbus NextGen eVTOL 航空器,就意大利的UAM 服务展开合作。
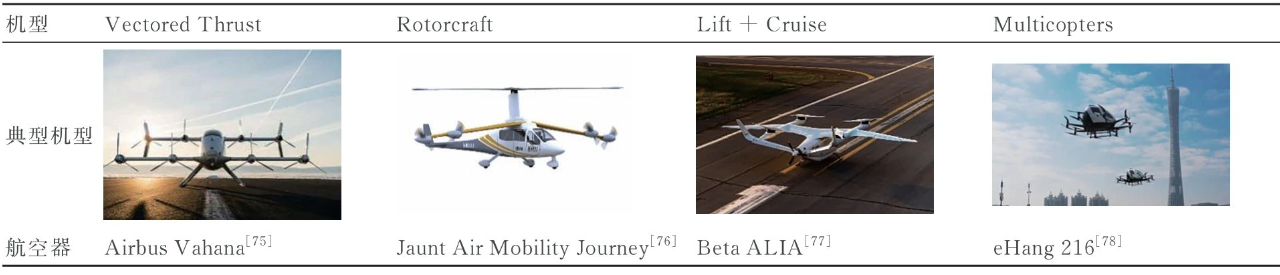
现有的eVTOL 航空器在巡航时间、载重、体积大小等方面各有差别。载人eVTOL 航空器的载运能力一般为1~5 座,物流eVTOL 航空器载荷可达500 kg。因此,针对不同的机型设定相同的适航标准是有必要的。通过适航标准统一不同生产制造商eVTOL 航空器的性能包线范围,让载运工具运行中采用相同的巡航速度、爬升下降率等参数将更有利于减小空中交通管理难度,提高城市空中交通的系统级运行安全程度。中国民航局立项建设无人驾驶航空器综合管理平台(Unmanned Aerial Vehicle Operation Management,UOM 系统),此系统实名登记了国内各类无人驾驶航空器的相关信息,为管理eVTOL 航空提供了数据基础。市面上4 种主流eVTOL 航空器如表3所示。
表3 市面上4 种主流eVTOL 航空器类型